WebComponents: ReactNative.View のような CSS の既定値を持つだけの x-view を作ってみる
ReactNative 触った事ある人なら、ReactNative.View の iOS の UIView や Android View みたいな一貫性のある基底クラスが羨ましい人も多いと思う。 今の Webでは実質 div がそれを担っているわけだが、div になんでも押し付けるのはよくないという意見もわかるところがあり、それ専用の基底となる x-view 要素を作るとどうなるだろうか。
ほしいもの
- デフォルトが
display: flex; - デフォルトが
box-sizing: border-box;
flex は便利だが Web のプリミティブ要素として既定値でflex を持つものはないので、毎度手数が多くなって嫌だなぁぐらいの気持ちがあった。
実装
とりあえず ReactNativeWeb がどう実装してるか真似しつつ実装した
const defaultViewStyle = document.createElement("style"); defaultViewStyle.textContent = ` :host { border-width: 0; border-style: solid; box-sizing: border-box; display: flex; flex-direction: column; align-items: stretch; margin: 0; padding: 0; position: relative; z-index: 0; min-height: 0; min-width: 0; } `; customElements.define( "x-view", class extends HTMLElement { constructor() { super(); const shadow = this.attachShadow({ mode: "open" }); shadow.appendChild(document.importNode(defaultViewStyle, true)); shadow.appendChild(document.createElement("slot")); } } );
children を展開する slot を持ち、自分自身(:host)にのみ適用するstyleを持つ。div を継承せず直接 HTMLElement の子要素になってる
style は毎度インラインのHTMLから生成するより、style を clone したほうが速いかも?と思ってこうしてるが、特に根拠はない。どうするのがいいんですかね。
これでこういうHTMLが動くようになる
<x-view style='height: 200px;'> <x-view style='flex: 1'>a</x-view> <x-view style='flex: 2'>b</x-view> </x-view>
デフォルト display: flex なので flex 値の付与だけでいい。(実際こんなstyleを直接書く書き方はしないが、簡単のため)
TypeScript
この要素を使って、React で
ReactDOM.render(<x-view>a</x-view>, element);
しようとすると、未定義要素を生成しようとしてるので怒られる。
React の型定義から、これを通す型宣言を追加する。
declare namespace JSX { interface IntrinsicElements { "x-view": React.DetailedHTMLProps< React.HTMLAttributes<HTMLElement>, HTMLElement >; } }
たぶんこんんあ感じ。
x-pane
x-view は ReactNative 互換を意識したのであんまり攻めた感じではなかったのだが、実際自分がCSS書く際は width: 100%; height: 100%; justify-content: center; align-items: center; を規定値として持つように作ることが多い。一般的なCSS仕草かは知らない。
名前思いつかないが、とりあえず x-pane とした。
const defaultPaneStyle = document.createElement("style"); defaultPaneStyle.textContent = ` :host { align-items: center; border-width: 0; border-style: solid; box-sizing: border-box; display: flex; flex-direction: column; height: 100%; justify-content: center; margin: 0; min-height: 0; min-width: 0; padding: 0; position: relative; width: 100%; z-index: 0; } `; customElements.define( "x-pane", class extends HTMLElement { constructor() { super(); const shadow = this.attachShadow({ mode: "open" }); shadow.appendChild(document.importNode(defaultPaneStyle, true)); shadow.appendChild(document.createElement("slot")); } } ); declare namespace JSX { interface IntrinsicElements { "x-pane": React.DetailedHTMLProps< React.HTMLAttributes<HTMLElement>, HTMLElement >; } }
<x-view style="height: 300px;"> <x-view style="flex: 2; background: gray;"> <x-pane style="color: green;">Pane0</x-pane> </x-view> <x-view style="flex: 1;"> <x-view style="flex-direction: row; height: 100%;"> <x-view style="flex: 3; background: #a88;"> <x-pane>Pane1</x-pane> </x-view> <x-view style="flex: 1; background: #8a8;"> <x-pane>Pane2</x-pane> </x-view> </x-view> </x-view> </x-view>
が
みたいな感じになる。
感想
IE webcomponents ポリフィルフレンドリーな書き方するとまた別の書き方になると思う。さして手が増えるわけではないが。
正直、この程度だったら .view {} でよい。webcomponents があふれかえる時代になったら、基底要素としてこういう書き方しても怒られないかもしれない、ぐらいの気持ち。
minfront: フロントエンド実験用のSPAボイラープレート
なんでそんな手が速いのか聞かれたので、最近使ってるSPAボイラープレートを紹介しておきます。
$ git clone git@github.com:mizchi-sandbox/minfront.git --depth 1 myspa $ cd myspa $ yarn install $ yarn dev # Start app server
終わり。
src/main.tsx か src/index.html を編集して、 yarn build && yarn deploy で netlify にアップロードできます。(要 netlify アカウント)
こんな感じ
https://gallant-yalow-997008.netlify.com
プロダクションで使えるちゃ使えるかもしれないけど、議論の余地があるようなものを含まない最小構成。
含まれるもの
- yarn
- parcel
- typescript
- jest
- netlify
含まれないもの
- 各種フレームワーク
- CI
- lint
言いたいこと
parcel のデフォルト設定がセンスよくて便利。ちょっと凝ったことやろうとすると無力。
ぶっちゃけこれ使うより、自分でボイラープレートを作るという体験が一番勉強になる感じ…
redux-workerized で Redux と Vue を接続する
作った。 yarn add redux-workerize で入る。
元々は react-hooks で redux へのアダプタを書いていただけのライブラリだったが…
- TypeScript フレンドリーなAPIにする
- ReactRedux.Provider の異なるAPI表現だけじゃ面白くない
- じゃあ Redux.Store を worker に置いて postMessage で更新しよう
- mapStateToProps や更新処理の抑制の処理もCPU使うから、worker に置こう
- JSON飛び交ってるだけだし、 React だけじゃつまらないから Vue Plugin も提供しよう
結果、ビジネスロジックが Worker に切り出された上で、 React と Vue が同じ Store を共有するようになった。
どうなってるかというと
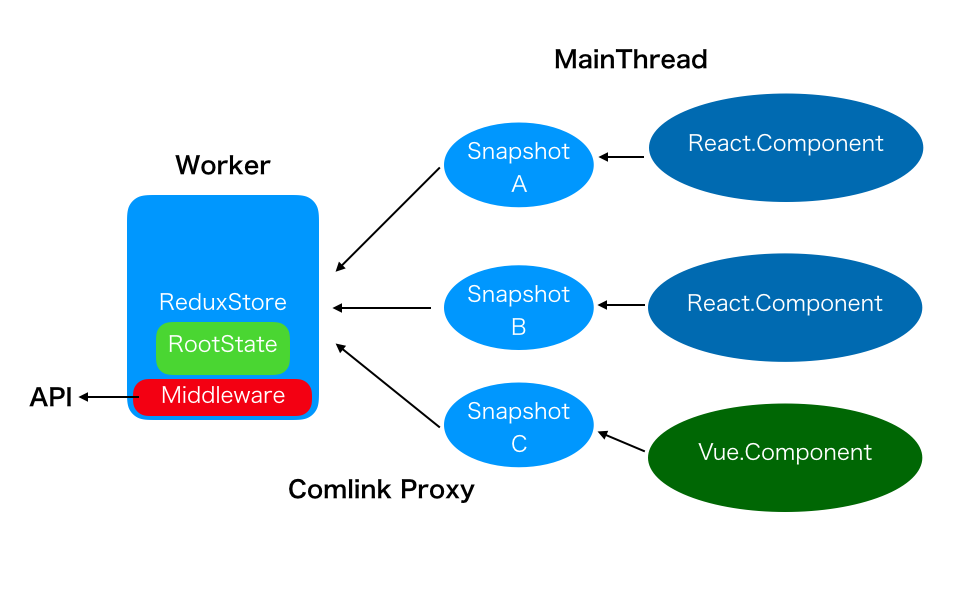
Worker が redux を抱えて、それぞれに Snapshot を切り出し、Snapshot を購読する各 Component がいる、という感じ
コード
import "@babel/polyfill"; import { RootState, increment, Increment, INCREMENT } from "./reducer"; const worker = new Worker("./worker.ts"); // React import React, { useCallback } from "react"; import ReactDOM from "react-dom"; import { createWorkerContext } from "redux-workerize/react"; const { WorkerContext, useSnapshot, useDispatch, ready } = createWorkerContext< RootState, { value: number } >(worker, async (state: RootState) => { return state.counter; }); function CounterApp() { const value = useSnapshot(state => state.value); const dispatch = useDispatch<Increment>(); const onClick = useCallback(() => { dispatch(increment()); }, []); return <button onClick={onClick}>{value}</button>; } ready.then(() => { ReactDOM.render( <WorkerContext> <CounterApp /> </WorkerContext>, document.querySelector(".react-root") ); }); // Vue import Vue from "vue"; import Vuex from "vuex"; import App from "./App.vue"; import { workerPlugin, proxy, SYNC } from "redux-workerize/vue"; Vue.use(Vuex); type CounterSnapshot = { value: number; }; export type State = { remote: CounterSnapshot; }; const store = new Vuex.Store<State>({ state: { remote: { value: 0 } }, mutations: { [SYNC](state, payload: CounterSnapshot) { state.remote = { ...state.remote, ...payload }; }, ...proxy([INCREMENT]) }, plugins: [ workerPlugin( worker, (state: RootState): CounterSnapshot => { return state.counter; } ) ] }); new Vue({ store, el: ".vue-root", render(h) { return h(App); } });
worker が Redux.Store を持つ実体で、フレームワークごとにラップするとその State を購読できる。第二引数で与える selector と snapshot は Worker 側で実行される。どうせWorkerを超えて非同期なので、非同期でも取れるようになってる。
React は hooks を使ってるので 16.7.0-alpha.0 以上じゃないと動かない。
Vue から直接 Redux 使うわけには行かないので Vuex を通してアクセスするようにした。Vuex.Store が ReduxStore の Snapshot を購読している。Redux が主なのは、型付けしやすいのと、Redux にはフレームワーク依存がないため。自分の好みといったらそう。
やってみたが、たぶん Vue Way ではないと思う。
Worker 側
import * as Comlink from "comlinkjs"; import { createStore } from "redux"; import reducer from "./reducer"; import { createWorkerizedStore } from "redux-workerized/worker"; const store = createStore(reducer); const storeAPI = createWorkerizedStore(store); Comlink.expose({ ...storeAPI }, self);
好きなように Redux.createStore して、createWorkerizedStore でラップして、 Comlink でクライアントに向けてAPIを公開する。
この結果、 Vuex から間接的に Redux Middleware を使える状態になっている。
やってみた感想
Worker でやってるのは、パフォーマンス目的もあるが、DOMに触れないという矯正ギプス的な意味のが大きい。
React と Vue でコミュニケーションできるようになったのは、単に結果であって、Worker に 共通の Store があるという設計に意味がある。
SerivecWorker でも動くので、複数タブでの状態の共有なんかにも使えるかもしれない。
本筋と関係ないが、Vue/Vuex の API の TypeScript との相性の悪さが絶望的で辛かった
React Hooks をどう使っていくか
大きく、末端コンポーネントと全体アーキテクチャの視点がある。
末端コンポーネントでの Hooks
ここはあまり議論の余地なく、setState で local state を持っているものや、 componentDidMount していたものを置き換えることが出来ると思う。
FC を class にせずにちょっとリッチにするのが簡単になる。
class の setState 相当
function Counter() {
const [count, setCount] = useState(0);
const onClick = useCallback(() => setCount(s => s + 1), []);
return <button onClick={onClick}>{count}</button>
}
componentDidMount / componentWillUnmount 相当
function KeyListenerer {
useEffect(() => {
const onClick = event => console.log(event.keyCode);
window.addEventListener('keydown', onClick);
return () => window.removeEventListener('keydown', onClick);
}, []);
return <span>...</span>
}
[] は返り値を memoize するためのキーで [] を与えると常に同じ参照を返す。
これは慣れてないとちょっと難しい。useEffect で [] を与えないと effect の実行は componentDidUpdate 相当になる。
一旦は memoize keys なしで書いて、再描画を抑制する必要があったら、ちょっと頭を捻ってkeysを与える感じになりそう。
(翻訳) React Hooks は魔法ではなく、ただの配列だ
React.memo と useCallback
useCallback の便利なところは、今まで class で this.onClickBound = this.onClick.bind(this) のような書き方をしていた箇所が、pure(or memo) の shallow equal 比較で memoize された関数参照なので true になる。React.memo と組み合わせることで、子に関数を参照を渡す時に render を抑制することが簡単になる。
こういうケースで有効。
const Button = React.memo(props => {
return <button onClick={props.onClick}>{props.value}</button>
});
function App() {
const onClick = useCallback(() => console.log('xxx'), []);
return <Button onClick={onClick} value={"foo"}/>
}
function Root() {
const [data, setData] = useState({})
useEffect(() => {
const id = setInterval(() => { setData(v => v + 1) });
return () => clearInterval(id);
});
return <App {...data}/>
}
App の親から App の render が掛かっても、Button の shallow equal は true なので、 Button は value が変わらない限り更新されない。
アーキテクチャ上の React Hooks and Suspense
ここは無限に議論の余地がある。誰もベストプラクティスを持ってない。
一応、トレンドとしてはマイクロフロントエンドがある。 [翻訳記事]マイクロフロントエンド - マイクロサービスのフロントエンドへの応用
React コアチームはマイクロフロントエンド的なものを志向しているように見える。Component がそれ自体でどんどん賢くなる方向性。Component に処理を書かず、一箇所に集約する Redux の Single Source 的な方向性は、素朴に使うとマイクロフロントエンドと対立する。
すごく大雑把に言うと、 organisms の接続先が redux store になるか、何らかの API を経由した先になるか。という違いになるのではないか。あるいは Component 自体が自身の接続ロジックを密に知ることになる。
Organisms 相当は、こんな風になるだろうか。
const Child = React.lazy(() => import('./Child'))
function MyOrg() {
const [state, setState] = useState(null)
useEffect(() => {
const data = readFooData();
setState(data)
});
return <Suspense fallback="loading..."><Child /></Suspense>
}
Suspense のことを考えると、一緒に非同期を解決してしまうのは確かに便利ではある。しかし、アプリケーション全体を協調させるための State が一つ欲しい。rcombineReducers は不要かもしれない。そうなると、 redux は使わず、 useReducer だけで済ませられる、かも。
[Fizz] New Server Rendering Infra by sebmarkbage · Pull Request #14144 · facebook/react
実験
手を動かして考えるためにこんなものを実装した。(npm に publish はしてない)
https://github.com/mizchi/redux-worker-context
react-redux の connect を useSelector(state => state.foo) と書きたかっただけだが、それだけでは面白くないので、MainTheard との関係を希薄にするために WebWorker に store の実体を移してみた。MainThread は worker の store から 自分に関係ある snapshot を受け取り、その利用者は更に snapshot を select して自分自身にマッピングする。
シングルトンだとしても、connect の mapStateToState で参照を絞るのはいいアイデアだと思うので、とりあえずそのまま redux を使った。
RootState => ComponentSnapshot => LocalSnapshot みたいなイメージ。これは Worker をサーバーに見立てて、クライアントだけでクライアント/サーバーモデルを擬似的に表現している。
これは、 middleware も redux のものになるので、既存資産はそのまま使える。WebWorker に処理が移ってるので CPU ヘヴィな操作がある程度許容される。
WorkerDOM みたいなものが実現可能になったら面白いことができるかもしれない、という期待もある。
Redux and Hooks
Redux は、まず消極的に、まず内部 API を変えるのに用いる、とのこと。useStore みたいな API が生えるとしても、だいぶ後。
https://github.com/reduxjs/react-redux/issues/1063#issuecomment-436479804
自分でhooksで遊びたかったら、現状自分で書くしかない。
「この〜を導入すると、なんとこうなりました!どうです?わかりやすいと思えませんか?」
主にUI設計やプログラミングのAPI設計について、「わかりやすい」というのは主観的で合意が取れないのでクソという話。
- 定量的な指標が示されてない
- そもそも趣味が合わない場合はそこで終わり
- 〜の本来意図された機能が隠れてしまっている
- ↑によって隠れてしまった機能を呼び出すのが、最終的にコストが掛かる
何が言いたいかと言うと、「指標の伴わない変更に意味はない」「APIの呼び方を変える程度のラッパーライブラリやヘルパーには、特に意味がない」ということです。
ここからプログラミングの話に絞りますが、特にショートハンドしたいだけの場合、ショートハンドするAPIの実装は、必ず本来の機能を呼び出す脱出ハッチも必要となります。
よく練られていない「わかりやすさ」は、次第にこの脱出ハッチを使うことを要求するようになり、結果として捨てられることになります。この破棄までの過程は、結果的に「技術的負債」と表現されるわけです。
例外は、あります。裏にある仕組み、概念、データ構造やアルゴリズムがとても秀逸で、しかしそのAPIの提供者が、ユーザーに見せるセンスが壊滅的な場合。
しかし、大抵の場合は、よく使われているライブラリのAPI作者は、よく練った上でそれを提供しているわけで、そう思えたとしても、ユーザーの無理解に起因していることが大半です。ラッパー関数を提供して、最終的にそれを使用しなくなる、というのは、プログラマなら誰でも経験したことがあるでしょう。
というわけで、ユーザーを混乱させるようなヘルパやライブラリを「作らない」ことにも価値があるのではないでしょうか。
もちろん、作ってみる経験は大事だと思いますけど、採用には必ず誰かを巻き込んだ議論が必要で、主観的な指標によらない、複数人による議論を経るという過程にこそ価値があるわけです。最終的には、とある実装ではなく、単に慣習やベストプラクティスという形に落ち着くかもしれません。例えばそういうものとして広まったものに、JSON などがあります。
というわけで、「わかりやすさ」の主張には慎重になってほしい、という話でした。
JavaScript エンジニア向け: 知識ゼロから tensorflow.js で機械学習入門
この週末で機械学習を勉強した結果として、JavaScript エンジニア向けにまとめてみる。
自分が数式見て何もわからん…となったので、できるだけ動いてるコードで説明する。動いてるコードみてから数式見たら、多少気持ちがわかる感じになった。
最初に断っておくが、特にJSを使いたい理由がないなら python で keras 使ったほうがいいと思う。tensorflow.js が生きる部分もあるが、学習段階ではそこまで関係ないため。
追記: 最初 0 < a < 1.0 0 < b < 1.0 で三角関数 Math.sin をとっていて、これだと三角関数の一部の値しか使っておらず、線形に近似できそうな値を吐いていたので、次のように変更して、データも更新した。
// 修正前 const fn = (a, b) => { const n = Math.cos(a) * b + Math.sin(b) * a; return a > b ? n : -n; }; // 修正版 const fn = (a, b) => { const n = Math.cos(a * Math.PI * 2) * b + Math.sin(b * Math.PI * 2) * a; return a > b ? n : -n; };
これにより、精度はやや落ちた。
概要
やりたいこと: ある関数の、入力と出力を模倣したい。
ニューラルネットを使うとどうなるか。
- モデルのネットワークは何かしらの関数を近似する
- 入力と出力は何かしらの行列(tensor)で表現される
ニューラルネットワークでは、ある入力のときの出力を見て、モデルに期待する値との誤差を教えると、ネットワークがその値を生成するように変化する
例
真のモデル関数 f = (a, b) => a + b が あったとき、モデルにはこの中身を教えず、その振る舞いを覚えさせたい。
入力値 [1, 3] を与えた際、 model.predict([[1, 3]]) が [[0]] を生成したとする。このときの期待する値 4 との差 -4 が model に伝えられると、4 を生成しやすいように、内部のネットワークの重み(weight, bias)が変化する。
ニューラルネットの中身がどうなってるか、とりあえず一番最初はブラックボックスだと思ってよい。なんかいい感じにやってくれる。
実際どう定義されているか、誤差からどうその重みが変化するかは、バックプロパゲーションなどで検索。
考え方
つまり、何かしらの状態を行列の表現に落として、その結果をどう評価するか既にわかっていて、また入力値が適切な因子として出力に関与することができ、また十分にモデルの内部ネットワークの複雑度があれば、大量のデータを与えると値が収束していく。
なので、何も仮説無くデータを突っ込んでも、適切なデータは出ないかもしれない。適切な因果を持つ、入力と出力のペアがあれば、データを与えれば与えるほど、精度が高くなる。
tensorflow.js で関数の振る舞いを予測する
ここから実践編。
適当に、こういう関数をでっち上げた。何も参考にしていない。完全にこの場の思いつきである。
const fn = (a, b) => { const n = Math.cos(a * Math.PI * 2) * b + Math.sin(b * Math.PI * 2) * a; return a > b ? n : -n; };
この関数は、与えられた a, b に対して結構複雑な振る舞いをする。正直自分でも頭の中でグラフ掛けないし、予測がつかない。三角関数を使ってるのと、a > b の比較を行っているので、非線形(直線ではない)振る舞いをする。
このとき、(a, b) の出力は無限にこの関数で生成できるので、それを教師データとして使って、誤差を伝えるように訓練する。
以下、そのときの tensorflow.js を使ったコード。30000 回実行してみた。
import "@babel/polyfill"; import * as tf from "@tensorflow/tfjs"; import "@tensorflow/tfjs-node-gpu"; // Intel Cuda の対応OSのみ有効 const fn = (a, b) => { const n = Math.cos(a * Math.PI * 2) * b + Math.sin(b * Math.PI * 2) * a; return a > b ? n : -n; }; function buildModel() { const model = tf.sequential(); model.add( tf.layers.dense({ units: 20, activation: "relu", inputShape: [2] }) ); model.add( tf.layers.dense({ units: 20, activation: "relu", inputShape: [1] }) ); model.add( tf.layers.dense({ units: 20, activation: "relu" }) ); model.add( tf.layers.dense({ units: 1, activation: "linear" }) ); model.compile({ optimizer: "sgd", loss: "meanSquaredError" }); return model; } function train(model, count = 30000) { // create data const inputs: number[][] = new Array(count) .fill(0) .map(_ => [Math.random(), Math.random()]); const answers: number[][] = inputs.map(x => [fn(x[0], x[1])]); const xs = tf.tensor2d(inputs); const ys = tf.tensor2d(answers); return model.fit(xs, ys, { epochs: 100, callbacks: { onEpochEnd: async (epoch: any, log: any) => { console.log(`Epoch ${epoch}: loss = ${log.loss}`); } } }); } async function run() { const model = buildModel(); await train(model); console.log("--- use trained model"); new Array(10).fill(0).forEach(() => { const input = [Math.random(), Math.random()]; const pred: any = model.predict(tf.tensor2d([input])); const real = fn(input[0], input[1]); console.log("in", input, "pred", pred.dataSync()[0], "real", real); }); } run();
なんか dense だの relu だの sgd だの meanSquaredError だの epoch だのいろんな概念が出てくるが、一旦はおまじないとして、気になったらググる感じで。実際には大したことない、身構えたのが馬鹿らしくなるような、シンプルな定義が多かった。
30000 回実行した後、本当に訓練できたか確認するのに、10 回実行してみている。
その結果
... eta=0.0 ================================> loss=0.01 2367ms 79us/step - loss=0.01 Epoch 97: loss = 0.008017721727490426 Epoch 99 / 100 eta=0.0 ================================> loss=0.01 2408ms 80us/step - loss=0.01 Epoch 98: loss = 0.007897231815196575 Epoch 100 / 100 eta=0.0 ================================> loss=0.00 2309ms 77us/step - loss=0.01 Epoch 99: loss = 0.008164751819210747 --- use trained model in [ 0.3962178765532509, 0.7682131016008036 ] pred 1.0202405452728271 real 1.0042189244656015 in [ 0.5636312166233701, 0.3811451901186962 ] pred 0.015699267387390137 real 0.031779120347658674 in [ 0.29081139359722297, 0.6065326337942547 ] pred 0.35762453079223633 real 0.3342764533539708 in [ 0.7485062557383053, 0.9206256550585616 ] pred 0.2782783508300781 real 0.3666547430935932 in [ 0.5138481068330991, 0.04557842574637938 ] pred 0.1076730489730835 real 0.09974545365571702 in [ 0.9162600474832179, 0.837541216933819 ] pred -0.043701171875 real -0.056856406373799406 in [ 0.7299011854033057, 0.8539316678532747 ] pred 0.5823078751564026 real 0.6872769887438305 in [ 0.02929035990521056, 0.4067624521196973 ] pred -0.445804238319397 real -0.4160877981686353 in [ 0.7649246937480239, 0.9202537029736069 ] pred 0.1884562373161316 real 0.28126628339301984 in [ 0.21538151181392773, 0.8708798400126363 ] pred -0.08348429203033447real -0.03174978980219534
思っていたより高い精度が出た。
正直、自分の思いつきの関数がここまで高い精度で模倣されたことにビビっている。とくに a > b の正負の出力に関してはほぼ確実に当ててきている。
最初は a + b や Math.sin(a + b) でやってみて、すぐ収束したのでこれなら無理じゃないかって関数を突っ込んでみてこの精度なので、結構感動していた。訓練時間は手元で 3 分ぐらい。
ちなみに、 tensorflow.js はブラウザ環境では WebGPU を使って訓練するので、下手な CPU 環境より速い。
追記: 200000回
26分掛けて200000回やってみた。誤差 0.008 から 0.003程度まで精度が上がった
eta=0.0 ================================> loss=0.00 15717ms 79us/step - loss=0.00 Epoch 96: loss = 0.002879959831906017 Epoch 98 / 100 eta=0.0 ================================> loss=0.00 15722ms 79us/step - loss=0.00 Epoch 97: loss = 0.003037940525643062 Epoch 99 / 100 eta=0.0 ================================> loss=0.00 15697ms 78us/step - loss=0.00 Epoch 98: loss = 0.0030612829002237413 Epoch 100 / 100 eta=0.0 ================================> loss=0.00 15749ms 79us/step - loss=0.00 Epoch 99: loss = 0.0031942650708649306 --- use trained model in [ 0.894890579256173, 0.791992136427107 ] pred -0.24931591749191284 real -0.23845978737014883 in [ 0.33861845138126845, 0.14223981949273057 ] pred 0.19588708877563477real 0.18875113058190596 in [ 0.533338516856545, 0.0756469011023253 ] pred 0.1673297882080078 real 0.17006682242955357 in [ 0.8359911024259461, 0.577326973633683 ] pred -0.09570872783660889 real -0.093409575348611 in [ 0.05713099891468687, 0.27499415441712993 ] pred -0.2965472340583801real -0.31389426496282413 in [ 0.2842413125538461, 0.19573535679085463 ] pred 0.2440524697303772 real 0.22609192489185875 in [ 0.8549135971844535, 0.7277203717553344 ] pred -0.4215628504753113 real -0.40083794824237673 in [ 0.8235456930613112, 0.2048808799839672 ] pred 0.8972318172454834 real 0.8820155692003951 in [ 0.8671403644770563, 0.47572531583815847 ] pred 0.4355853497982025 real 0.45111927209825686 in [ 0.853777499934028, 0.09838342580279558 ] pred 0.5768846273422241 real 0.5544972469695729 ✨ Done in 1592.47s.
応用
tensorflow 自体は、入力と出力の最適化をしてくれるだけで、実際にどういうモデルを構築するか、どういう入力を与えるかは、結局人間が考える。
モデルをどう作るかは、最初は検討もつかないかもしれないが、自分もよくわからなくていろんな人に聞いたが、結局うまくいったモデルを参考にするしかないとのこと。大抵は論文になっていて、その解説があって、そのネットワークの構造をコードに落とすと再現できる(らしい。自分もまだそこまでたどり着いてない)。
流行りのものだと、画像を入力にする時にいい感じに次元を絞るのが CNN、時系列データから最終的な結果を全体に伝搬させたいのが DQN、2 つのモデルを競わせたり検証させたりするのが GAN、という理解をしている(GAN はまだふわっとしている。これから実装して勉強する)
勉強するなら
今回は js で書いたが、正直 python の方が keras での実装例が多くて勉強は捗ると思う。jupyter やら matplotlib だの色々便利ツールがある。
自分が tensorflow.js で遊んでるのは、ブラウザゲームのゲーム AI を作りたくて、js と python で同じ環境を二回実装するのが嫌、という理由なので、そういう理由がなければ python で keras 使っとくのがいいと思う。
python で実行した tensorflow のモデルを、tensorflow.js でも使えるような json にコンパイルできるので、訓練環境はどっちでもいい。
というのが一週間ぐらい勉強した成果。
keras 使って DQN で迷路を解いてみた
世界観をつかめるぐらいには機械学習やっておきたいと思い、とりあえず何かしらのお題がないと興味が続かなさそうなので、二次元の盤面上で何かしらの行動をする、ローグライクのモンスターのエージェントを作るのを目標にしようと思う。自分がゲーム作るとき、大抵エージェントのルール作る段階で飽きてくるので。
今回の記事は、迷路を解くところまで。
学習資料
- [Python]強化学習(DQN)を実装しながらKerasに慣れる - Qiita
- DQNをKerasとTensorFlowとOpenAI Gymで実装する
- 全力で人工知能に対決を挑んでみた(理論編) - ニコニコ動画
雰囲気を掴むのに、ニコ動の解説動画わかりやすかった。
よく使われてる OpenAI Gym 、見た目は派手だが、環境変数が多すぎていまいち理解の助けにならない + 次元が多すぎて収束が遠いので、すごい単純なゲームルールを自分で作って、それを自分で解く形式を探した。
その結果、迷路を解かせるこのコードがわかりやすかったので、これをリファクタしながら勉強した。
https://github.com/shibuiwilliam/maze_solver
こっちは自分のリファクタ後のコード。迷路生成部分を含めて268行。Solver の定義 + 訓練は 150行ぐらい。
keras tensorflow numpy が入ってれば動くはず。元コードは pandas 使ってたが、リファクタしてたら不要になった。
勉強過程で、コピペでポンと動くやつがなかなかなくて困ったので、シングルファイルでポンと動くことを意識してる。環境構築は 前回の記事参照。
ゲームルール
- 10x10のランダム生成の迷路を S から G までゴールできれば50点
- 踏むと -1点 されるマスが散らばってる
- 一番高いスコアでゴールできたモデルの勝ち
こんな感じ(@@ はエージェントの位置)
.
# # # S # # # # # #
# -1 # 0 -1 # 0 0 -1 #
# -1 # -1 0 0 -1 -1 -1 #
# 0 -1 # # 0 -1 -1 -1 #
# 0 0 0 0 0 0 # 0 #
# 0 -1 -1 0 0 -1 -1 # #
# -1 -1 0 0 # -1 -1 0 #
# -1 # -1 0 -1 -1 -1 -1 #
# 0 0 0 -1 -1 @@ -1 -1 #
# # # # # # 50 # # #
環境はいわゆるゲームって感じの実装で、機械学習は全然関係ない。
DQN Solver の考え方
点p(x1, y1) から 点p(x2, y2) へ遷移する際のスコアを表にする(マルコフ決定過程)
[p(0, 1) => p(0, 2)] => score(p(0, 1), p(0, 2)) [p(0, 1) => p(1, 1)] => score(p(0, 1), p(1, 1)) [p(1, 1) => p(1, 2)] => score(p(1, 1), p(1, 2)) ...
score の評価関数は、そのときのスコアと、さらにその次で取りうる一歩の中うち、最大のスコアになるものにγを掛けたものを足す。(今回は0.9)
その部分のコード (target_f がそれ)
if done: target_f = reward else: next_rewards = [] for a in next_movables: np_next_s_a = np.array([[next_state, a]]) next_rewards.append(self.model.predict(np_next_s_a)) np_n_r_max = np.amax(np.array(next_rewards)) target_f = reward + GAMMA * np_n_r_max
次の一歩を先読みしてるスコアになっているので、何度も繰り返すうちに、最終的にプラスになるものが各セルの評価スコアとして伝搬されるはず。次の一歩の評価を含んでいるので、中間状態でマイナスになっていてもそれも打ち消される。
学習ステップ
- とりあえず最初はゴールするまでランダムに歩かせる
- 行動履歴の中から、ランダムで(最大)32個の状態を取り出して、
p(x1, y1) => p(x2, y2) => rewardのスコアの組を model.fit (訓練) する - ε-greedy で訓練された予測スコアに少しずつ従うようになる
訓練部分
def replay_experience(self, batch_size): batch_size = min(batch_size, len(self.memory)) minibatch = random.sample(self.memory, batch_size) x = [] y = [] for i in range(batch_size): state, action, reward, next_state, next_movables, done = minibatch[ i] input_action = [state, action] if done: target_f = reward else: next_rewards = [] for a in next_movables: np_next_s_a = np.array([[next_state, a]]) next_rewards.append(self.model.predict(np_next_s_a)) np_n_r_max = np.amax(np.array(next_rewards)) target_f = reward + GAMMA * np_n_r_max x.append(input_action) y.append(target_f) self.model.fit(np.array(x), np.array([y]).T, epochs=1, verbose=0)
行動選択部分
def choose_action(self, at, movables): if self.epsilon >= random.random(): return random.choice(movables) else: return self.choose_best_action(at, movables) def choose_best_action(self, at, movables): best_actions = [] max_act_value = -100 for a in movables: np_action = np.array([[at, a]]) act_value = self.model.predict(np_action) if act_value > max_act_value: best_actions = [ a, ] max_act_value = act_value elif act_value == max_act_value: best_actions.append(a) return random.choice(best_actions)
訓練されるモデルの定義
def build_maze_solver(): model = Sequential() model.add(Dense(128, input_shape=(2, 2), activation='tanh')) model.add(Flatten()) model.add(Dense(128, activation='tanh')) model.add(Dense(128, activation='tanh')) model.add(Dense(1, activation='linear')) model.compile(loss="mse", optimizer=RMSprop(lr=LEARNING_RATE)) return model
最初の層の input_shape が (2, 2) なのは (x1, y1), (x2, y2) のような形になるため。最後の activation する層が、予測される reward の出力。中間層は二層。なんで二層かはよくわかってない。たしかにこれで収束する。
10000回ゴールするまで実行する。(たぶん、収束するまで10000回じゃ足りないのだが、何度もデバッグするのが面倒だったので減らしている)
EPISODE_COUNT = 10000 MAX_WALK_COUNT = 1000 solver = Solver() for e in range(EPISODE_COUNT): at = field.start_point score = 0 for time in range(MAX_WALK_COUNT): movables = field.get_actions(at) action = solver.choose_action(at, movables) reward, done = field.get_value(action) score = score + reward next_state = action next_movables = field.get_actions(next_state) solver.remember_memory(at, action, reward, next_state, next_movables, done) if done or time == (MAX_WALK_COUNT - 1): if e % 500 == 0: print("episode: {}/{}, score: {}, e: {:.2} \t @ {}".format( e, EPISODE_COUNT, score, solver.epsilon, time)) break at = next_state solver.replay_experience(32)
結果
episode: 500/10000, score: -486.0, e: 0.95 @ 999 episode: 1000/10000, score: -9.0, e: 0.9 @ 126 episode: 1500/10000, score: 20.0, e: 0.86 @ 40 episode: 2000/10000, score: -108.0, e: 0.82 @ 280 episode: 2500/10000, score: 17.0, e: 0.78 @ 54 episode: 3000/10000, score: 25.0, e: 0.74 @ 46 episode: 3500/10000, score: 23.0, e: 0.7 @ 34 episode: 4000/10000, score: 20.0, e: 0.67 @ 50 episode: 4500/10000, score: 31.0, e: 0.64 @ 26 episode: 5000/10000, score: 10.0, e: 0.61 @ 56 episode: 5500/10000, score: 23.0, e: 0.58 @ 48 episode: 6000/10000, score: 35.0, e: 0.55 @ 20 episode: 6500/10000, score: 31.0, e: 0.52 @ 32 episode: 7000/10000, score: 41.0, e: 0.5 @ 16 episode: 7500/10000, score: 38.0, e: 0.47 @ 24 episode: 8000/10000, score: 36.0, e: 0.45 @ 24 episode: 8500/10000, score: 38.0, e: 0.43 @ 24 episode: 9000/10000, score: 37.0, e: 0.41 @ 30 episode: 9500/10000, score: 38.0, e: 0.39 @ 22
score が徐々に上がって、辿り着くまでのステップ数も減っていってる
中間層の数でどのような影響があるか
全部抜いてみた
def build_maze_solver(): model = Sequential() model.add(Dense(128, input_shape=(2, 2), activation='tanh')) model.add(Flatten()) model.add(Dense(1, activation='linear')) model.compile(loss="mse", optimizer=RMSprop(lr=LEARNING_RATE)) return model
結果
episode: 500/10000, score: 7.0, e: 0.95 @ 75 episode: 1000/10000, score: -51.0, e: 0.9 @ 257 episode: 1500/10000, score: -59.0, e: 0.86 @ 349 episode: 2000/10000, score: -343.0, e: 0.82 @ 999 episode: 2500/10000, score: -262.0, e: 0.78 @ 999 episode: 3000/10000, score: -277.0, e: 0.74 @ 999 ...
初回は偶然うまくいったが、全く収束しなくて笑った
一つだけ抜いてみた
def build_maze_solver(): model = Sequential() model.add(Dense(128, input_shape=(2, 2), activation='tanh')) model.add(Flatten()) model.add(Dense(128, activation='tanh')) model.add(Dense(1, activation='linear')) model.compile(loss="mse", optimizer=RMSprop(lr=LEARNING_RATE)) return model
結果
episode: 500/10000, score: -117.0, e: 0.95 @ 413 episode: 1000/10000, score: 6.0, e: 0.9 @ 83 episode: 1500/10000, score: -54.0, e: 0.86 @ 195 episode: 2000/10000, score: 8.0, e: 0.82 @ 73 episode: 2500/10000, score: 35.0, e: 0.78 @ 39 episode: 3000/10000, score: 31.0, e: 0.74 @ 61 episode: 3500/10000, score: 27.0, e: 0.7 @ 57 episode: 4000/10000, score: 34.0, e: 0.67 @ 31 episode: 4500/10000, score: 32.0, e: 0.64 @ 39 episode: 5000/10000, score: 33.0, e: 0.61 @ 31 episode: 5500/10000, score: 42.0, e: 0.58 @ 27 episode: 6000/10000, score: 40.0, e: 0.55 @ 19 episode: 6500/10000, score: 40.0, e: 0.52 @ 27 episode: 7000/10000, score: 37.0, e: 0.5 @ 27 episode: 7500/10000, score: 39.0, e: 0.47 @ 27 episode: 8000/10000, score: 39.0, e: 0.45 @ 19 episode: 8500/10000, score: 32.0, e: 0.43 @ 35 episode: 9000/10000, score: 42.0, e: 0.41 @ 21 episode: 9500/10000, score: 43.0, e: 0.39 @ 17
収束してる。精度はあまり変わってないような気がする。
中間層を2つ足した
def build_maze_solver(): model = Sequential() model.add(Dense(128, input_shape=(2, 2), activation='tanh')) model.add(Flatten()) model.add(Dense(128, activation='tanh')) model.add(Dense(128, activation='tanh')) model.add(Dense(128, activation='tanh')) model.add(Dense(128, activation='tanh')) model.add(Dense(1, activation='linear')) model.compile(loss="mse", optimizer=RMSprop(lr=LEARNING_RATE)) return model
結果
episode: 500/10000, score: -447.0, e: 0.95 @ 965 episode: 1000/10000, score: -24.0, e: 0.9 @ 137 episode: 1500/10000, score: 27.0, e: 0.86 @ 47 episode: 2000/10000, score: 24.0, e: 0.82 @ 45 episode: 2500/10000, score: 19.0, e: 0.78 @ 73 episode: 3000/10000, score: 41.0, e: 0.74 @ 27 episode: 3500/10000, score: 32.0, e: 0.7 @ 27 episode: 4000/10000, score: 41.0, e: 0.67 @ 21 episode: 4500/10000, score: 30.0, e: 0.64 @ 39 episode: 5000/10000, score: 40.0, e: 0.61 @ 23 episode: 5500/10000, score: 37.0, e: 0.58 @ 23 episode: 6000/10000, score: 40.0, e: 0.55 @ 25 episode: 6500/10000, score: 45.0, e: 0.52 @ 15 episode: 7000/10000, score: 40.0, e: 0.5 @ 19 episode: 7500/10000, score: 38.0, e: 0.47 @ 27 episode: 8000/10000, score: 40.0, e: 0.45 @ 27 episode: 8500/10000, score: 39.0, e: 0.43 @ 25 episode: 9000/10000, score: 39.0, e: 0.41 @ 19 episode: 9500/10000, score: 44.0, e: 0.39 @ 21
収束はしてるけど、これ以上増やしても無意味みたいな点がありそう
これ最終的なモデル実行時間が遅くなったりするんだろうか。
ゲーム用のエージェントを作るなら
ダイクストラと A* は何度も書いてるので、今回の題材は自分には理解しやすかった。
今回の迷宮(環境)は固定だが、与えられた任意の迷宮を解きたければ、たぶん、自分自身を中心としてゴール含むN*Nの相対座標系でクリッピングした行列を入力値に含む必要がありそう。そうするとめっちゃ入力値多い…
移動アクションの他、攻撃アクションを追加してみるとか、その際の彼我の HP の変動とかを入力に含んでみるとゲームっぽくなりそう。
どのへんまで環境変数増やすと計算爆発するとか収束しないとか、そのへんの勘所がないので色々試してみないとまだわかんなさそう。DOTA II のエージェントを作った論文があるので、それを読むといいんだろうか。
今の時点では、正直 keras の便利さがよくわかってなくて、直接 tensorflow 使うのとそんなに変わんなさそう。
python 久しぶりに書いた感じだと、スコープのガバガバさでイラッとする場面が多く、 let のような変数宣言がほしい気持ちになりがちだった。